n esta seccion encontrareis los ejercicios realizados con el robot ABB ( de manera Virtual) , en los cuales tendreis una pequeña descripcion , y el codigo empleado
2º Ejercicio : Programacion de Movimientos MoveJ
Este ejercicio consta de cojer 6 puntos en cuestion como vereis en el codigo a continuacion , y entre medias situar dos puntos de espera , para hacer unas soldaduras , tambien os adjunto una vista previa de la trayectoria a realizar .
El siguiente video es la simulacion del codigo utilizado para este ejercicio :
Este ejercicio consta de cojer 6 puntos en cuestion como vereis en el codigo a continuacion , y entre medias situar dos puntos de espera , para hacer unas soldaduras , tambien os adjunto una vista previa de la trayectoria a realizar .
El siguiente video es la simulacion del codigo utilizado para este ejercicio :
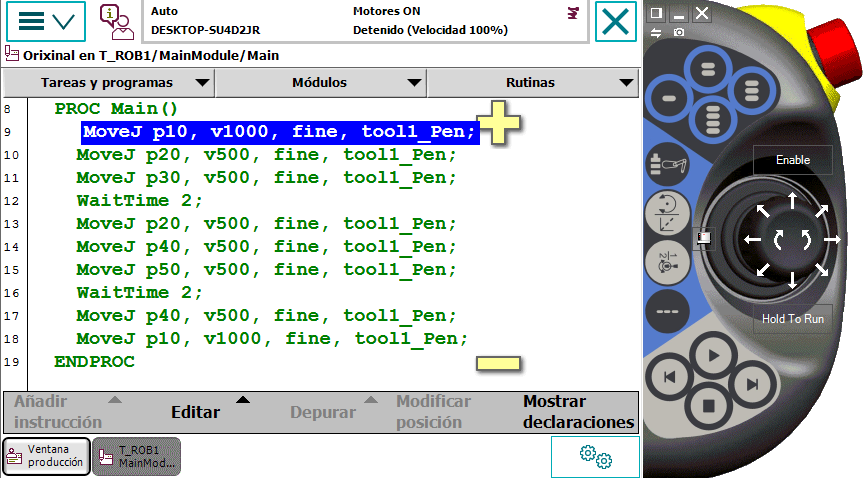
4º Ejercicio : Programacion de Movimientos MoveJ con FlexPendant
Este ejercicio consta de cojer 6 puntos en cuestion con la programadora tal como esta realizado en el codigo a continuacion , y entre medias situar dos puntos de espera , para hacer unas soldaduras ,
tambien os adjunto una vista previa de la trayectoria a realizar .
El siguiente video es la simulacion del codigo utilizado para este ejercicio :
5º Ejercicio : Programacion de Movimientos MoveL con FlexPendant
Este ejercicio consta de cojer 6 puntos en cuestion como vereis en el codigo a continuacion realizado con la programadora , y entre medias situar dos puntos de espera , para hacer unas soldaduras , tambien os adjunto una vista previa de la trayectoria a realizar .
El siguiente video es la simulacion del codigo utilizado para este ejercicio :
6º Ejercicio : Desplazamiento de objetos y soldadura de estos
El funcionamiento del ejercicio se basa en :
1º : Añadimos el primer IRB120 , y los 3 bloques ( 1 de cada color , para que nos sea mas facil distinguirlos ) y los situamos enlas coordenadas que nos dan , aparte colocamos la ventosa
2º : Colocamos el segundo IRB120 ( que sera el robot de soldadura ) , y colocamos las bases para luego trabajar con ellas,ya que si en un futuro hace falta cambiar los puntos de la trayectoria , modificamos directamente la base; aparte colocamos la herramienta de soldadura.